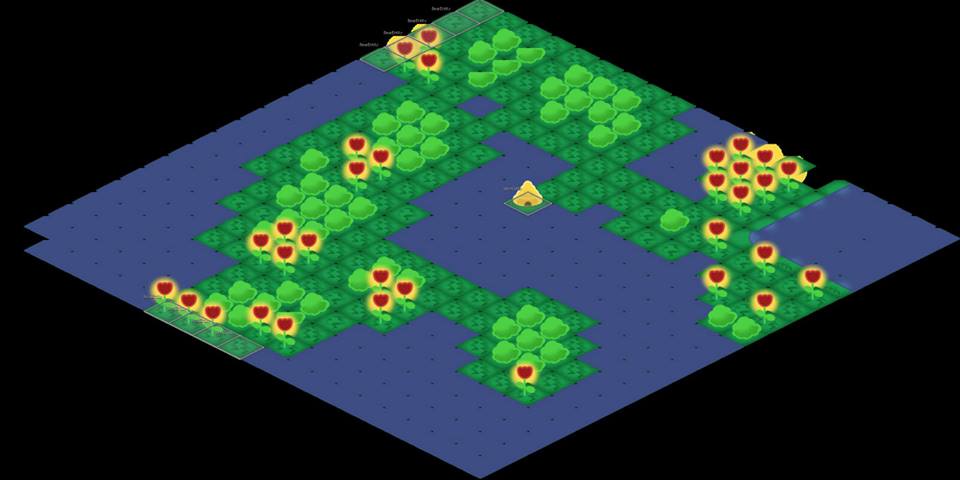
Your mission is to pollinate all of the flowers on the level. The bears are after you! So defend your honey and keep the bears from spoiling everything.
Tap on the map to assign an idle bee to explore and reveal the map. Tap on flowers to assign a bee to pollinate. Flowers require 5 trips or 5 bees to fully pollinate. Tap on the bear to sacrifice a bee on defense, and trying to fill his annoyed meter and scare him away.
Across the top there is the number of available bees, hive capacity, number of idle, exploring, harvesting and attacking bees. Also the amount of honey that you have.
Programmed in HTML 5 with the Melon JS game engine for web based use.